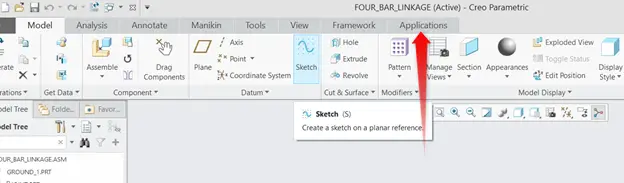
Go into Applications.
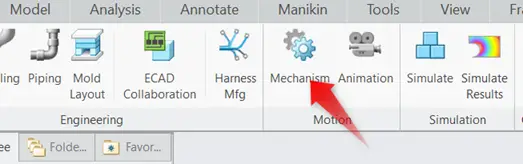
Click Mechanism.
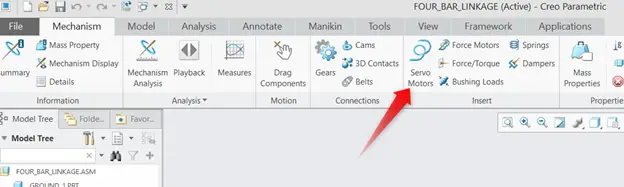
Click Servo Motors.
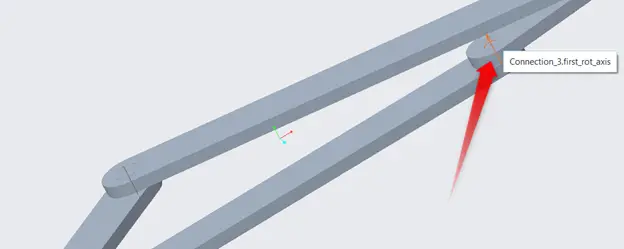
When we click servo motors, we are asked to provide an item, in our case, we are going to click the crank point, where the constraint was a pin joint. Servo motors can be installed at pin joints.
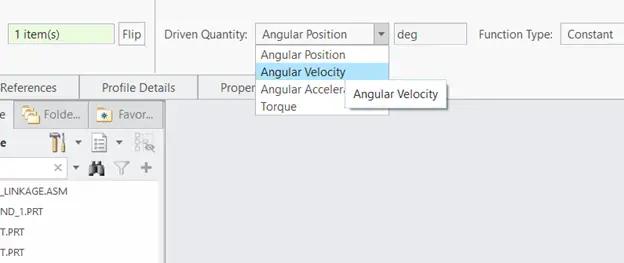
Choose the driven quantity to angular velocity. We have done this because we want to provide our parameter in terms of velocity.
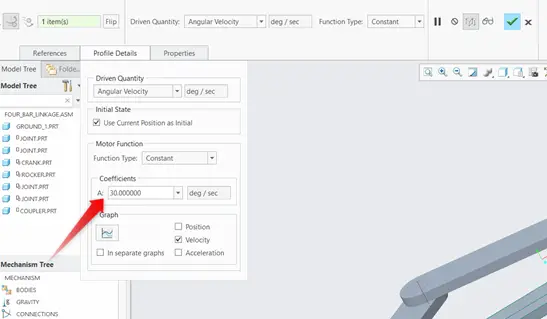
In profile details, change the co-efficient to 30. We have set the angular velocity to 30 rad/s.
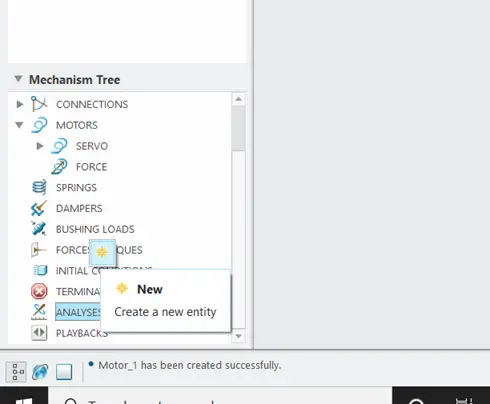
In the Mechanism tree, click the analyses, and then click new to make a new analysis. In the analyses, we can analyze the mechanism.
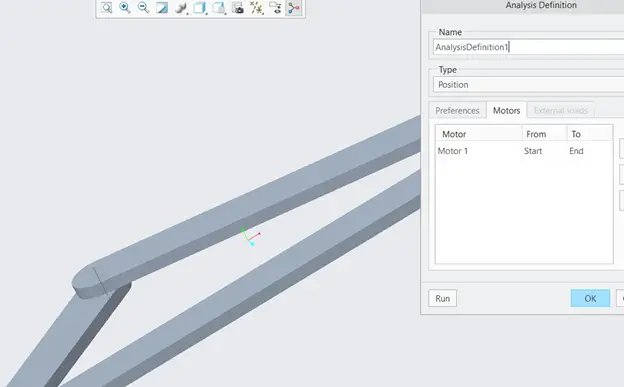
A window will pop up, change the time to 50 seconds. Then click on motors and then click run, our four bar mechanism would start moving.
by updated